 In februari 2020 kocht ik via marktplaats een (tweedehands) Omegon Dobson Advanced XN 254/1250, zoals deze. Tijdens het waarnemen van objecten blijkt al heel snel het nadeel: door de draaiing van de aarde verdwijnt datgene wat je aan het bekijken bent al snel uit beeld, en moet je de telescoop eigenlijk handmatig bijsturen. Dit vind ik niet erg gemakkelijk gaan, en veroorzaakt ook dat de telescoop trilt. Nu schijnt dit gemakkelijker te gaan als je meer bedreven bent in het bedienen van een telescoop op zo’n dobson montering, maar… dat kan handiger. Er is een ‘eenvoudige’ manier en een iets moeilijkere manier.
In februari 2020 kocht ik via marktplaats een (tweedehands) Omegon Dobson Advanced XN 254/1250, zoals deze. Tijdens het waarnemen van objecten blijkt al heel snel het nadeel: door de draaiing van de aarde verdwijnt datgene wat je aan het bekijken bent al snel uit beeld, en moet je de telescoop eigenlijk handmatig bijsturen. Dit vind ik niet erg gemakkelijk gaan, en veroorzaakt ook dat de telescoop trilt. Nu schijnt dit gemakkelijker te gaan als je meer bedreven bent in het bedienen van een telescoop op zo’n dobson montering, maar… dat kan handiger. Er is een ‘eenvoudige’ manier en een iets moeilijkere manier.
De eenvoudige manier is een equatoriaal volgplatform. Dit is een platform waar je de dobson montering + telescoop dan op zet. Het zorgt ervoor, dat met slechts één motor de telescoop ongeveer een uur lang het object blijft volgen. Na die tijd loopt zo’n volgplatform tegen zijn fysieke limiet, en moet het weer teruggedraaid worden naar de beginpositie. Je moet dan de telescoop wel weer eerst op het te bekijken object richten. Voor visueel waarnemen ok, voor fotografie eigenlijk te kort.
De iets ‘moeilijkere’ manier behelst het motoriseren van de twee draairichtingen van de montering. Een dobson-montering heeft twee draai-richtingen: horizontaal (‘Azimuth’, ‘AZ’), en vertikaal (‘Altitude’, ‘ALT’). Horizontaal kan de telescoop een volledig rondje draaiien, dat wil zeggen 360 graden. Vertikaal kan de telescoop zowel naar de horizon, als naar het zenith (het punt recht boven je) gericht worden, dat wil zeggen 90 graden. Dus als we twee motoren op elke draairichting plaatsen, kunnen we de montering motoriseren.
Het leek mij het meest voor de hand liggend om de montering te motorizeren, met als basisdoel het ervoor zorgen dat het te bekijken object wordt gevolgd – dus dat de beweging van de draaiing van de aarde wordt gecompenseerd. Maar omdat er voor de logica hierachter toch een computer en software nodig is, kan er net zo goed meteen maar een GOTO systeem van gemaakt worden.
Ter inspiratie beschrijf ik hier het proces van idee tot realisatie.
Idee
Mijn idee is een GOTO systeem dat nauwkeurig en snel de telescoop naar een gewenst object beweegt, en vervolgens volgt. Het GOTO systeem wordt bediend met een draadloze handcontroler, of via een app op de telefoon, of via standaard software op de laptop. Het systeem heeft GPS aan boord, zodat het zelf weet waar het zich op aarde bevindt en ook hoe laat het is. Op de telescoop zit een kompas zodat het zichzelf kan kalibreren, in beide richtingen. Klikt goed he. Maar de praktijk is weerbarstig.
Motorizeren van de horizontale beweging

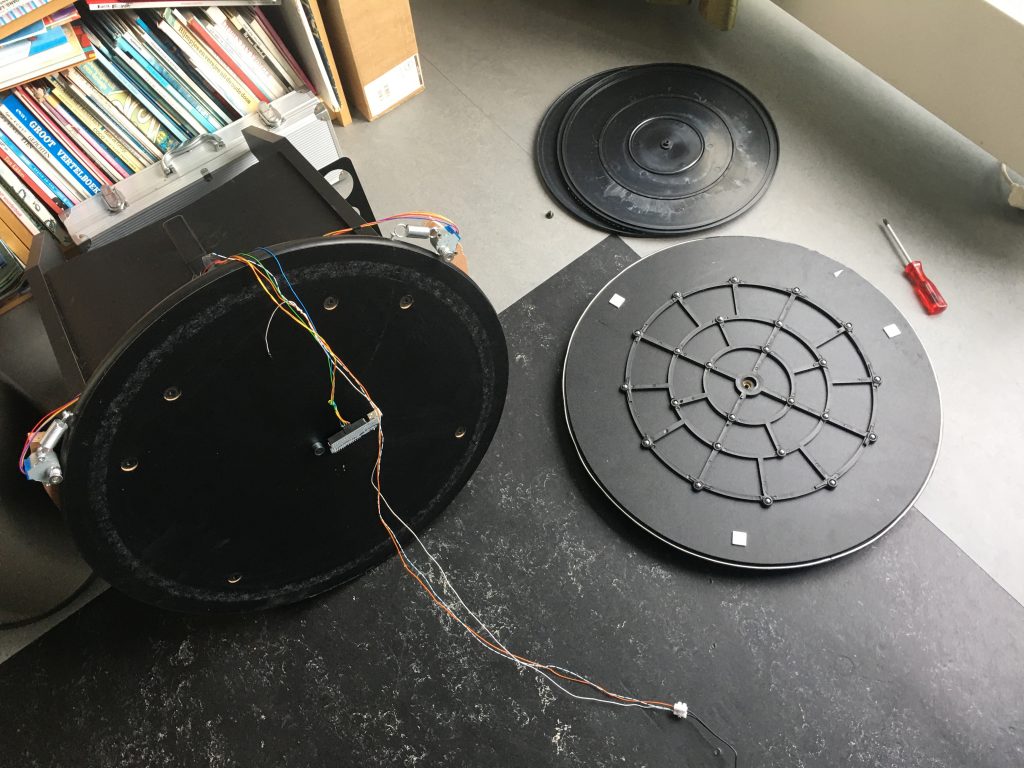
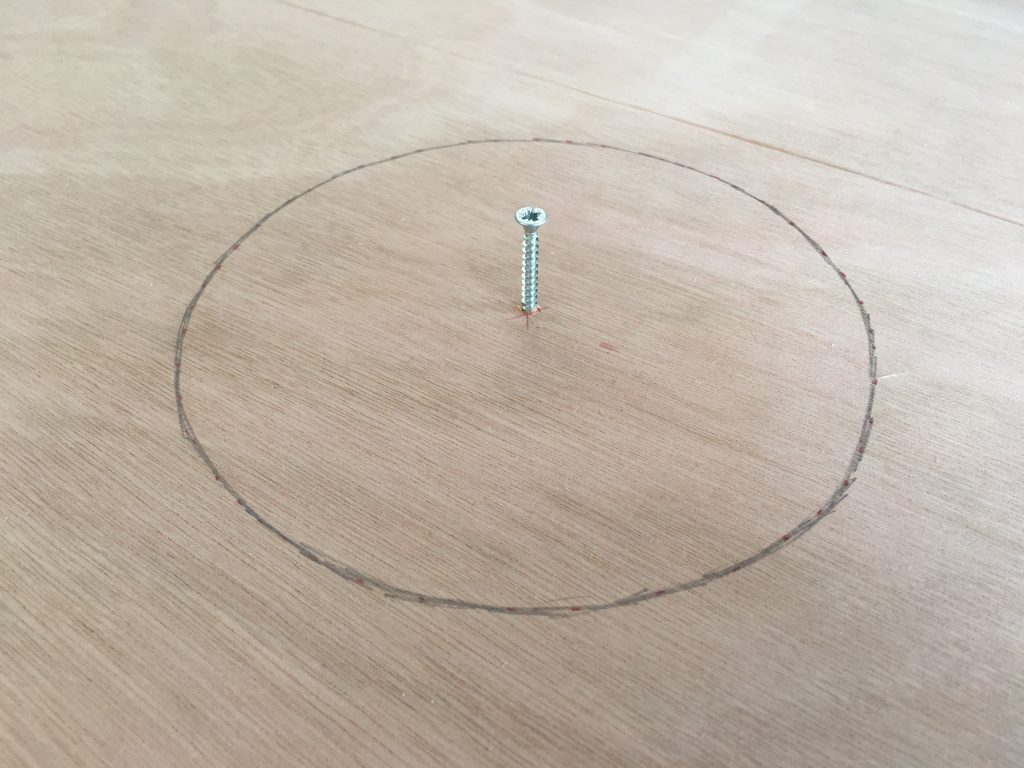
De horizontale beweging van een dobson montering wordt gerealiseerd door twee ronde schijven die in het centrum aan elkaar vastzitten met een pin. De onderste schijf bevat drie pootjes waar de montering mee op de grond staat. Tussen de schijven zijn een aantal stukjes teflon geplaatst, waardoor de schijven eenvoudig over elkaar heen kunnen bewegen, maar toch enigzins aan elkaar plakken. Op de bovenste schijf is een constructie geplaatst dat de telescoop zelf draagt.
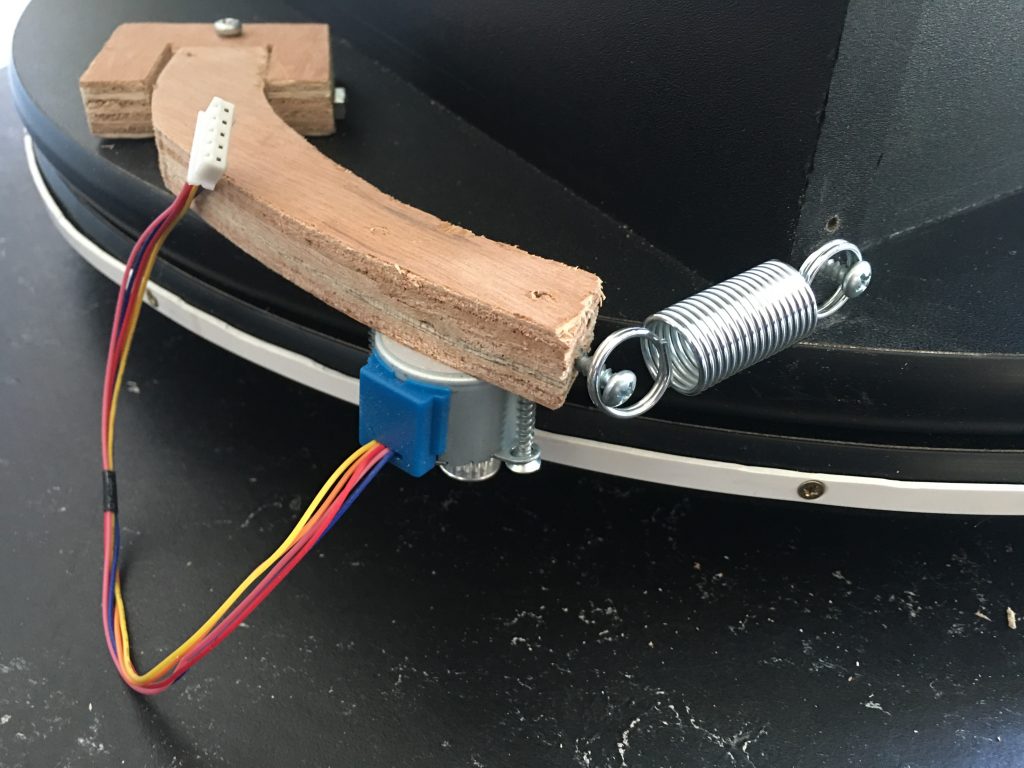
Om de twee schijven gemotoriseerd te bewegen heb ik bedacht op de onderste schijf aan de buitenrand een getande riem te monteren, en op de bovenste schijf een motor die met een tandwiel in deze getande riem grijpt en zo de telescoop een horizontale beweging geeft. Getande riem, tandwiel en motor komt op de 3D-printer wereld, dus dat is makkelijk en eenvoudig voorhanden.
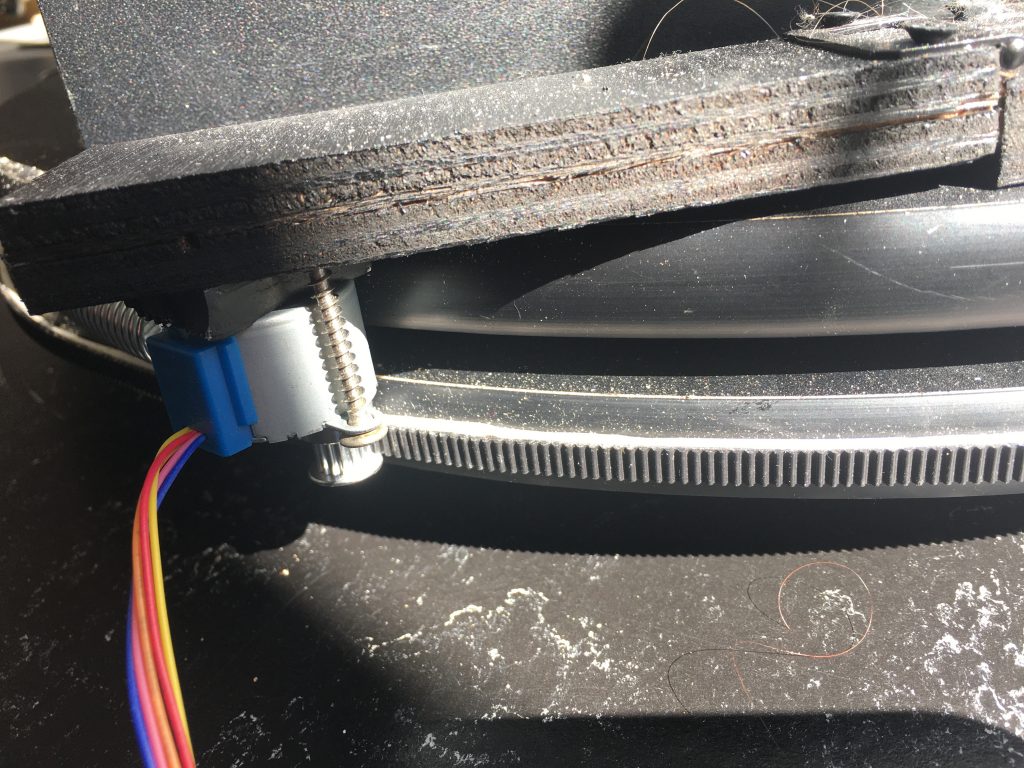
Om de tandwiel voldoende grip te geven, moet de getande riem voldoende afstand van de schijf krijgen. Daarom heb ik bij de bouwmarkt een strip plastic gekocht, dat met een dremel dwars doormidden gezaagd en met schroefjes in de zijkant van de schijf gemonteerd. De getande riem heb ik met tien-seconde-lijm hierop geplakt. De twee uiteinden van de getande riem liggen tegen elkaar aan en vormen helaas net geen goede ‘tand’. Ook is de getande riem her en der iets teveel omhoog of omlaag geplakt. De motor moet dus voor een goede grip in vertikale richting kunnen bewegen. Bij experimenten bleek al snel dat 1 motor te weinig kracht heeft om het geheel in beweging te krijgen. Het motortje gaat wel draaien, maar draait zichzelf uit de riem omhoog. Een veer moet zorgen voor een betere grip. Na heel veel experimenten ben ik geeindigd met 4 motoren die synchroon draaien. Er is er dan hopelijk altijd wel een of twee die voldoende grip hebben. Ook zijn de stukjes teflon vervangen voor een stel lagers, die uit een draaischijf komen. Zo’n draaischijf is bedoeld voor mensen die uit een rolstoel moeten gaan staan en dan een draaiing moeten maken.

De plastic strip wordt met een dremel doormidden gezaagd


De strip wordt op regelmatige afstand voorzien van verzonken gaten



Een eerste probeersel van de motorophanging voor de azimuthale beweging


Het opplakken van de getande riem, met 10-seconde lijm – en plakband voor de eerste fixatie.
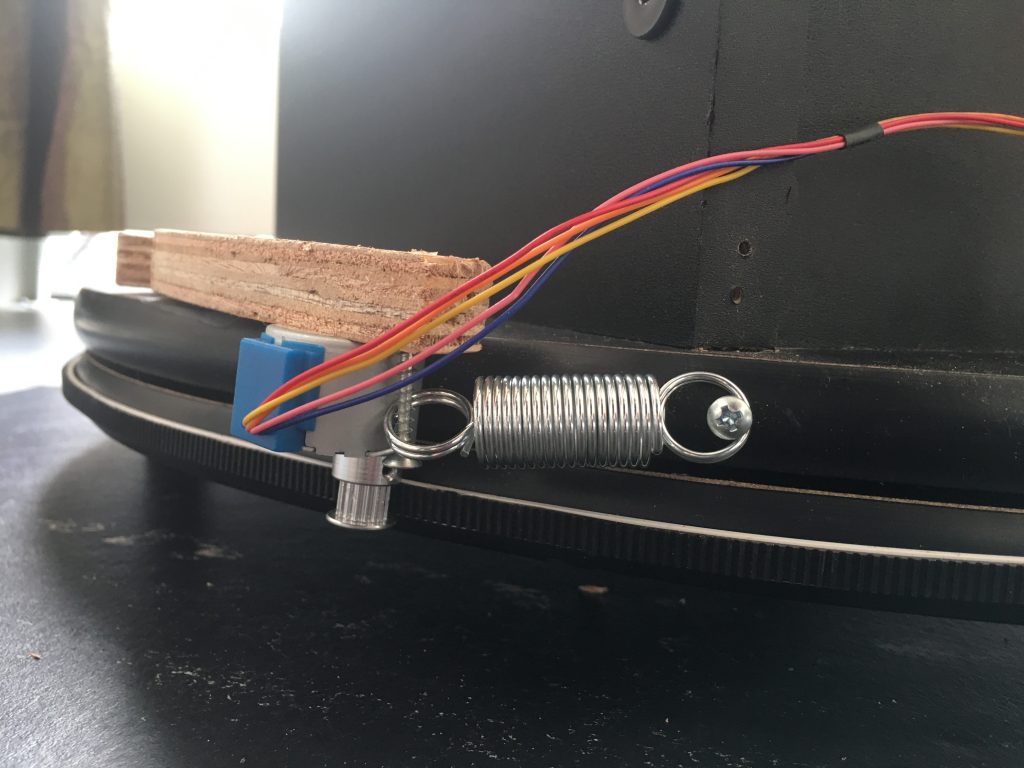
Onderzoek naar of de poelie van het motortje netjes om de getande riem heen grijpt
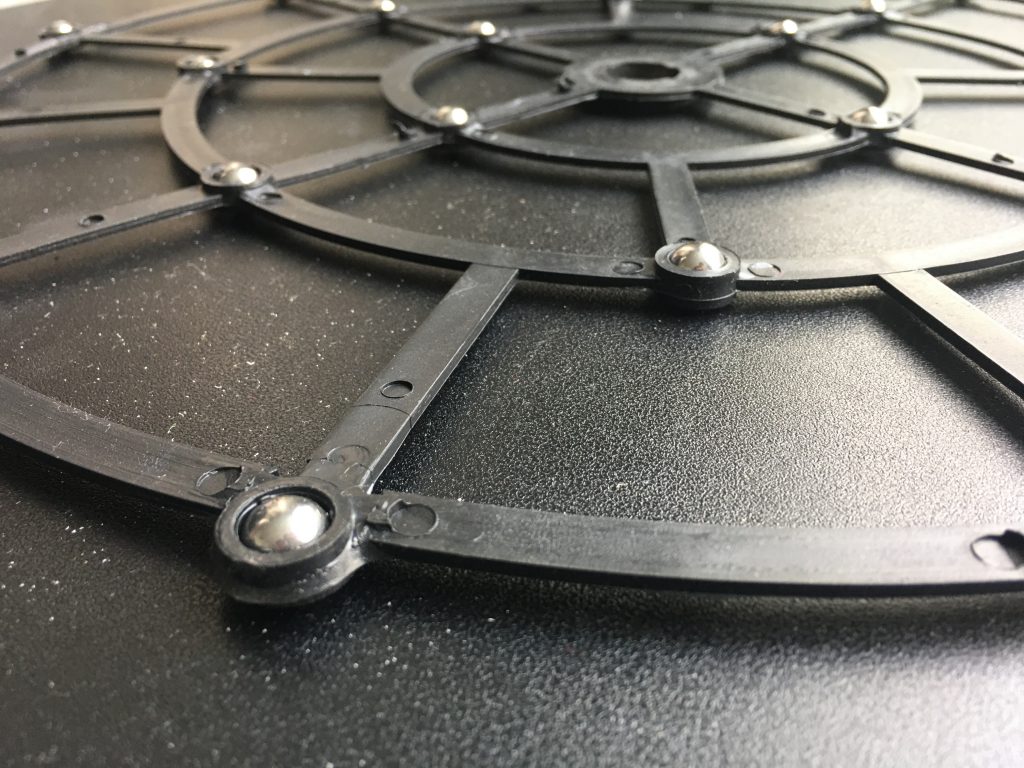
De draaischijf-lagers
De draaischijf-lagers ligt gewoon los tussen de platen – hij kan nergens heen vanwege de as die beide platen bij elkaar houdt
De flexibele motor-ophanging, gemaakt van stukjes hout en meubelscharnieren

Motorizeren van de vertikale beweging

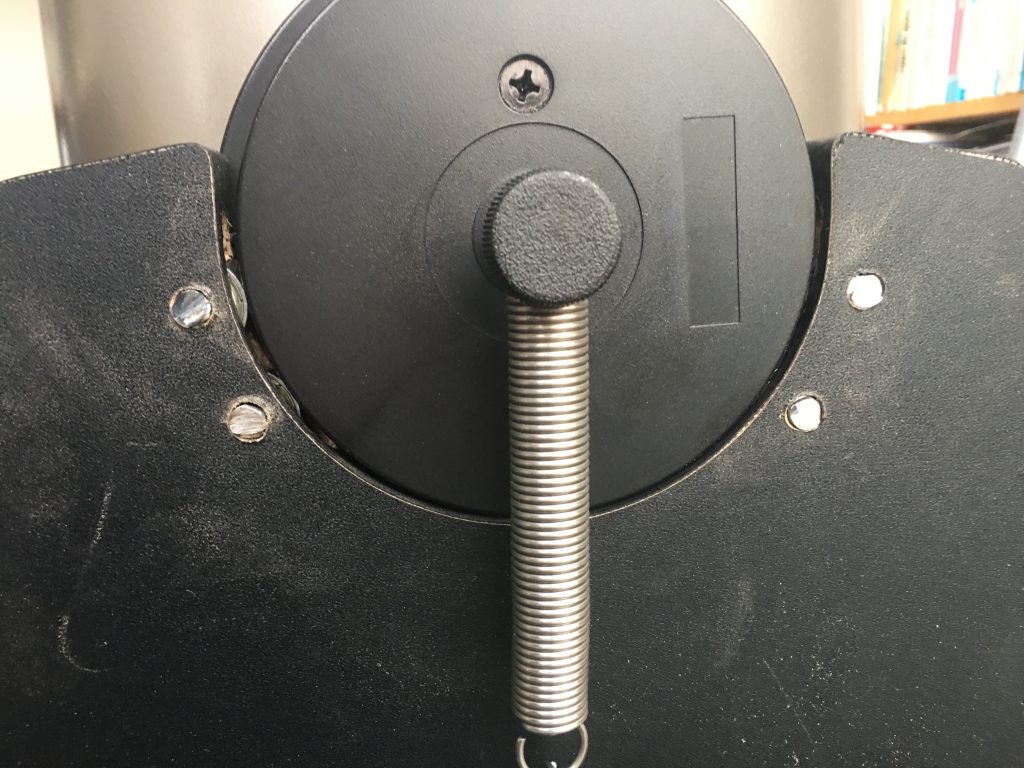
De vertikale beweging van een dobson montering wordt gerealiseerd door twee schijven die aan de telescoop zijn vastgemaakt, en die elk in een ‘kom’ ligt. Ook hier zorgen stukjes teflon ervoor dat het geheel eenvoudig beweegt, maar toch een beetje plakt.
Op de schijf heb ik een getande riem geplakt, en met een tweede getande riem deze geprobeerd aan te drijven met een motortje. Er zat geen beweging in. Ik heb de teflon weggehaald en vervangen voor rollagers. Dat hielp niks. Ik heb beide zijden uitgerust met een motor, maar ook dat was niet genoeg – de twee riemen grijpen niet goed in elkaar.






Uit de mechanica is de regel dat Moment = kracht * afstand. Dus als je met weinig kracht toch veel moment wil hebben (en daar hebben we nu blijkbaar te weinig van), dan moet je de afstand vergroten. Ik heb twee halve grote schijven gemaakt, om zodoende voldoende moment te hebben om de telescoop vertikaal in beweging te krijgen. Dit werkt wel.
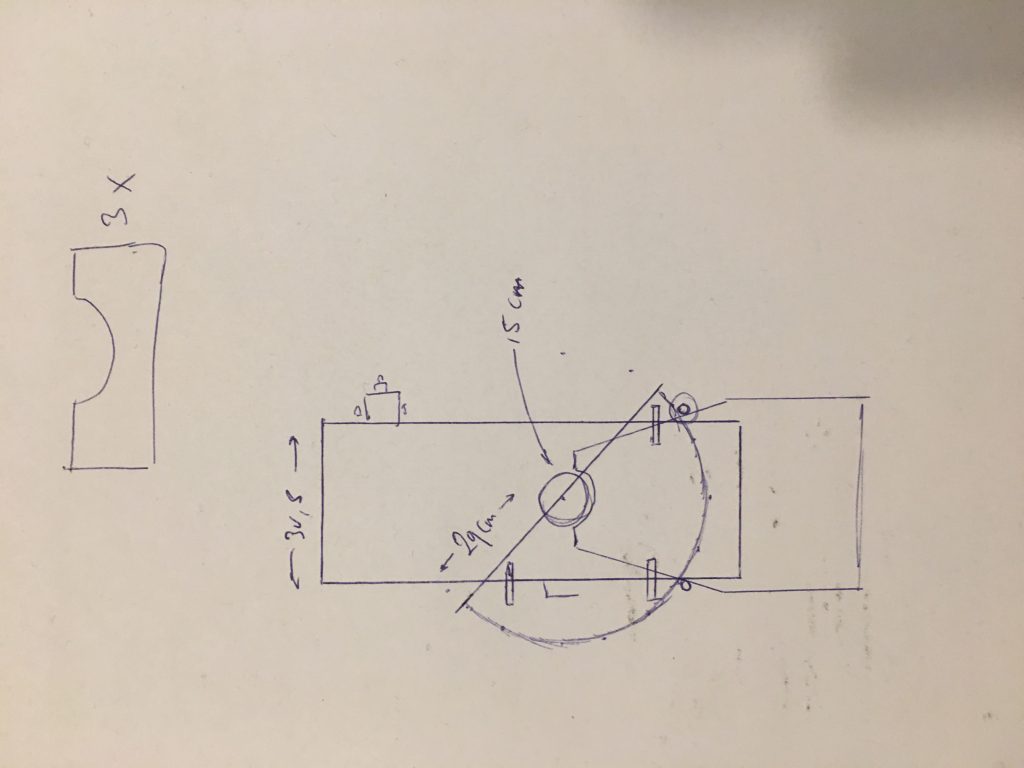


Omdat de telescoop zo erg los bleek te liggen, en niet in balans was, heb ik een volledige cirkel gezaagd.




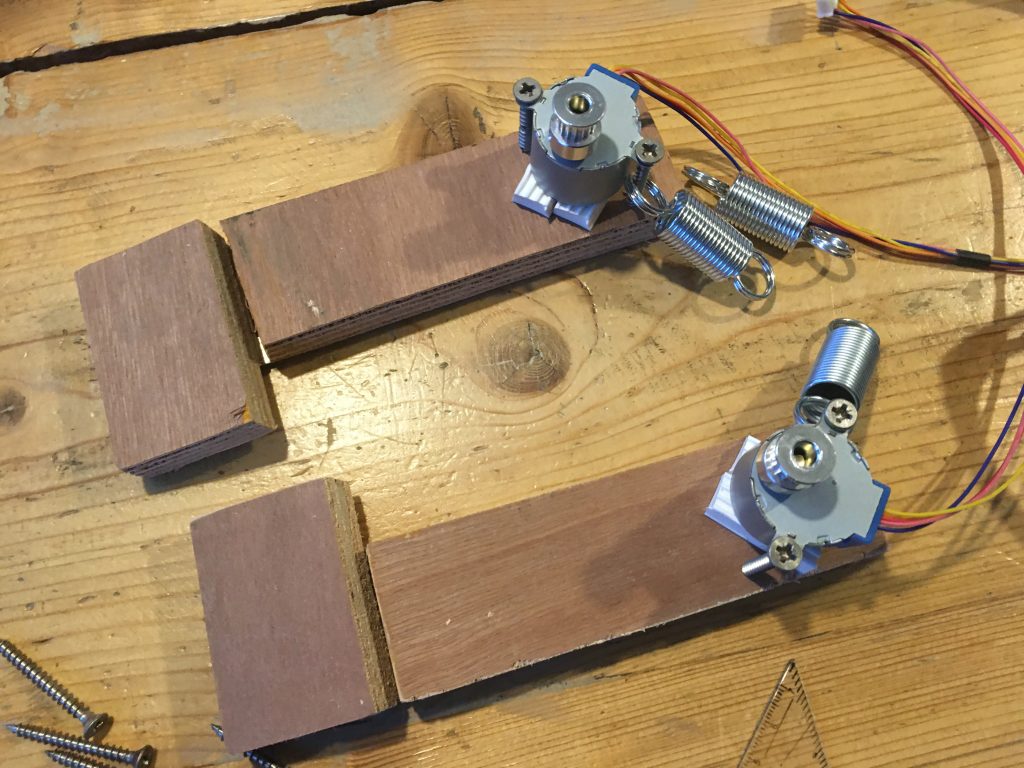
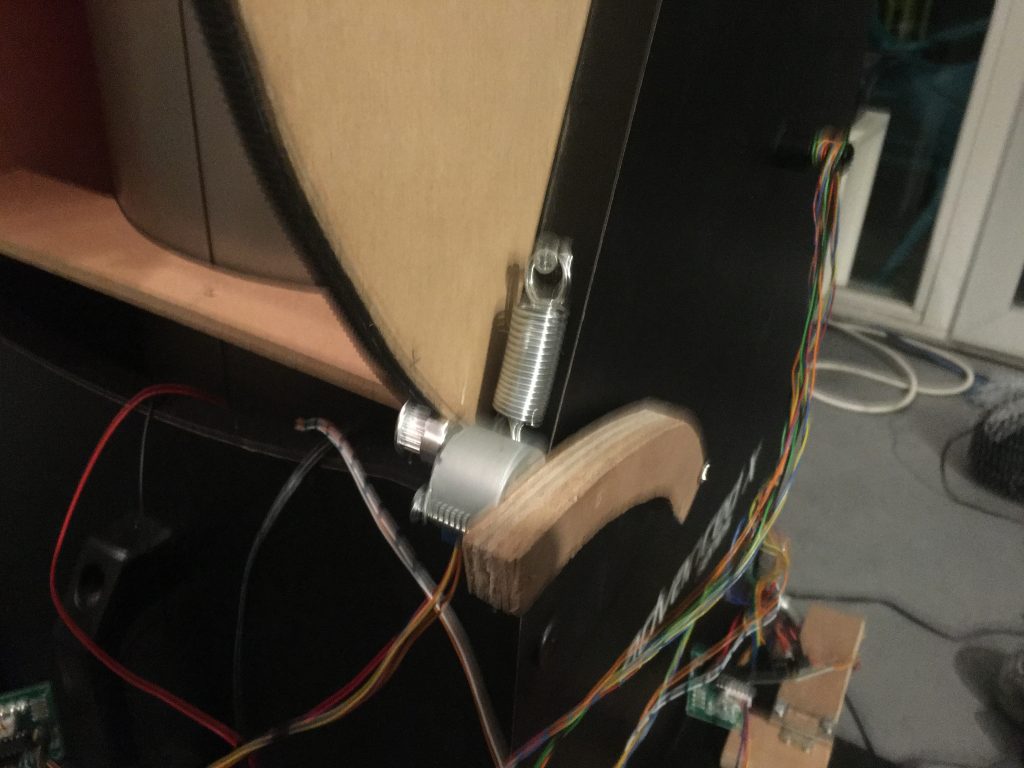
De motoren zijn gemonteerd op armpjes die horizontale en vertikale beweging van de motor mogelijk maken. Met een veer wordt het tandwiel tegen de schijf geduwd, om voldoende grip te krijgen.
De schijven zijn gemaakt van triplex. Om de getande riem, voldoende hoogte te geven, heb ik een reststukje getande riem ertussen gepropt. Voor de 90 graden beweging hoeft ook de schijf maar voor een kwart voorzien te worden van getande riem. De schijf zelft hoeft dus ook eigenlijk maar een kwart schijf te zijn, maar voor de gewichtsbalans heb ik besloten er toch een volledige schijf van de maken.
Het geheel is met een spuitbus zwarte verf zwart gespoten.
Arduino
Omdat ik al ervaring had met het schrijven van software voor het Arduino-platform, leek het mij voor de hand liggend om dat ook nu als uitgangspunt te nemen. Een Arduino-Uno bleek tijdens het schrijven te weinig geheugen te hebben – daarom overgestapt op de Arduino-Mega. Deze heeft ook zijn beperkingen, zoals nog steeds beperkte opslagcapaciteit en een gebrek aan double-precision-berekeningen. De beperkingen zijn op ingenieuze wijze omzeild door de lijsten van objecten (Messier, sterren, NGC, etc) in het programma-geheugen te zetten i.p.v. in het runtime-geheugen. Zoiets. Daarnaast is er gebruikt gemaakt van de ‘BigNumbers’-bibliotheek waarmee berekeningen met hele grote getallen gedaan kunnen worden en de beperkingen van het niet hebben van een floating-point-unit verdwijnt. Ik zal de software verderop in meer detail bespreken.
GPS
Voor het bepalen van de posities van objecten aan de hemel, is het belangrijk te weten welke dag het is, hoe laat het is, en waar we ons ergens op de aarde bevinden. Veel GOTO-systemen laten je deze informatie zelf invoeren, maar een GPS-module is voor minder dan 10 euro te koop, en aan te sturen via de Arduino-software. Dat lijkt mij het meest voor de hand liggend.
Kompas
Het leek me handig om de positie van de dobson-montering te kunnen bepalen, nog voordat er een positie-calibratie is uitgevoerd met behulp van twee of drie sterren (het uitlijnen). Als we dan b.v. op de poolster willen richten dan weten we met behulp van het kompas hoe de montering alvast grofweg gedraaid moet worden.
De electronische kompasjes die ik geprobeerd heb aan te sluiten hebben allemaal de onhebbelijke eigenschap dat 1) voor een nauwkeurige bepaling je de module eerst een 8-tje in de lucht moet laten maken. Dat is natuurlijk niet handig als zo’n kompas op de montering is gemonteerd. 2) de modules verdragen niet meer dan 3V spanning, terwijl de Arduino Uno op 5V draait. Dat scheelt 2V, voldoende om zo’n kompasje eenvoudig op te blazen voordat je er erg in hebt en de nodige voorzorgsmaatregelen hebt genomen.
Het kompas-gedeelte van het ontwerp is om deze twee redenen geparkeerd. Op termijn lijkt het me toch handig om toe te voegen, maar nu nog niet.
Bluetooth
Ook leek het me handig om de software een bluetooth- of wifi-verbinding te geven, zodat de telescoop met externe software aan te sturen is. Voor nu heb ik dit gedeelte geparkeerd.
Tijdens het tracken, maken de stappenmotorjes ‘stappen’ die doortrillen in het beeld. Daardoor kan je niet rustig een object bewonderen, het trilt teveel heen en weer. Om dit te voorkomen, zouden de stappenmotoren geen stappen moeten doen, maar een continue beweging moeten maken. De zoek-termen die hierbij horen zijn ‘trinamic silect stepper motor’.